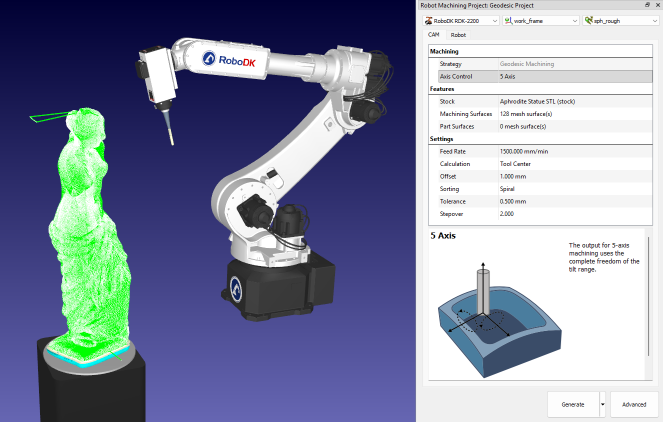
使用 RoboDK CAM,您可以为任何机器加工操作创建和模拟高级刀具路径。无论是铣削、抛光还是其他任何机加工应用,您都可以轻松应用从简单的 3 轴任务到复杂的 5 轴机加工策略。
技术特点
RoboDK CAM 包括粗加工和精加工技术,以保持精度和表面完整性。从繁重的材料去除到精细的表面精加工,您都可以在整个制造过程中优化生产。
技术特点
RoboDK 可让您完全控制进刀和退刀动作、间隙平面和工艺参数。对任何变量进行微调,以提高安全性、减少工具磨损并提高整体效率。
技术特点
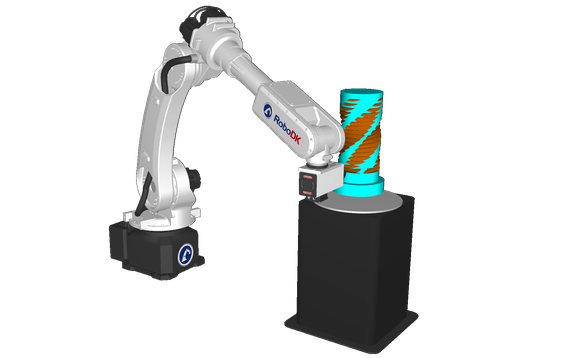
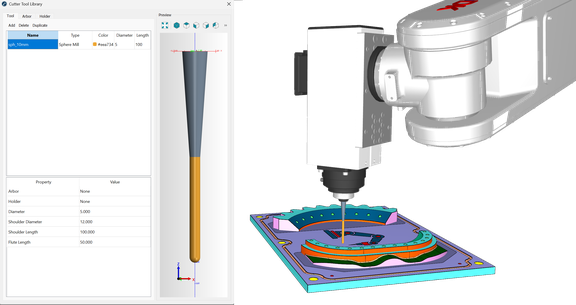
使用 RoboDK,您可以精确定义切割工具,确保稳定的设置和机器人加工环境的精确模拟。
技术特点
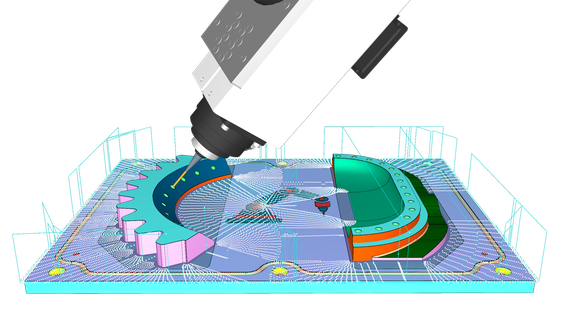
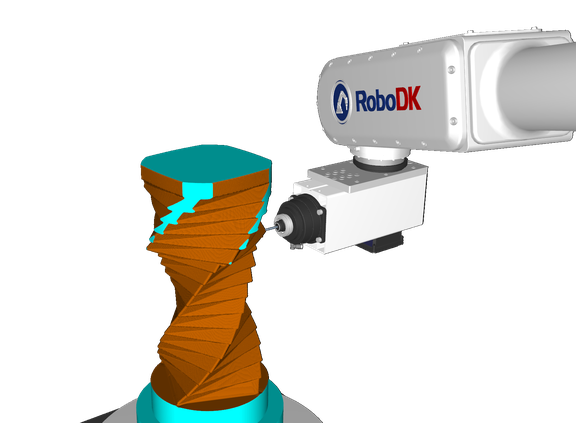
RoboDK 支持先进的表面机加工策略,可处理复杂形状、暗切、混合过渡和基于花键的路径。实现复杂零件的平滑精加工。
技术特点
RoboDK 可让您定义和跟踪毛坯材料,确保最佳的工具啮合。通过模拟之字形和螺旋形路径等切割策略,可以减少浪费并保持工艺稳定性。
技术特点
使用RoboDK快速、准确地创建数字孪生

在几分钟内为任何机械臂创建仿真和机器人程序,RoboDK软件让您轻松、准确地仿真您的工业机器人!
将机器人用于制造应用,例如机器人加工或者3D打印。为五轴数控程序(如G代码或APT-CLS)实现仿真和生成机器人控制器程序。
轻松离线生成适用于任何机器人控制器的真机程序,您无需再学习特定供应商的编程技术。
导入STL、STEP和IGES等格式的3D模型,精确创建您的数字孪生。
RoboDK后处理器支持多款机器人控制器,包括ABB RAPID(mod/prg)、发那科(LS/TP)、库卡KRC(SRC)、安川Motoman Inform(JBI)、优傲(URP/script)等!
轻松集成和模拟带有外轴的机器人,扩展机器人的可触及范围。
校准机器人手臂以提高精度,最高可达0.100毫米。RoboDK软件将仿真、校准标定功能集于一身。
轻松创建离线数字孪生系统,防止出现机器人奇异点状态、轴极限和碰撞。
使用Python、C#或C++等现代编程语言创建机器人程序,开发人员还可以轻松自定义软件界面。
RoboDK参与的客户成功案例