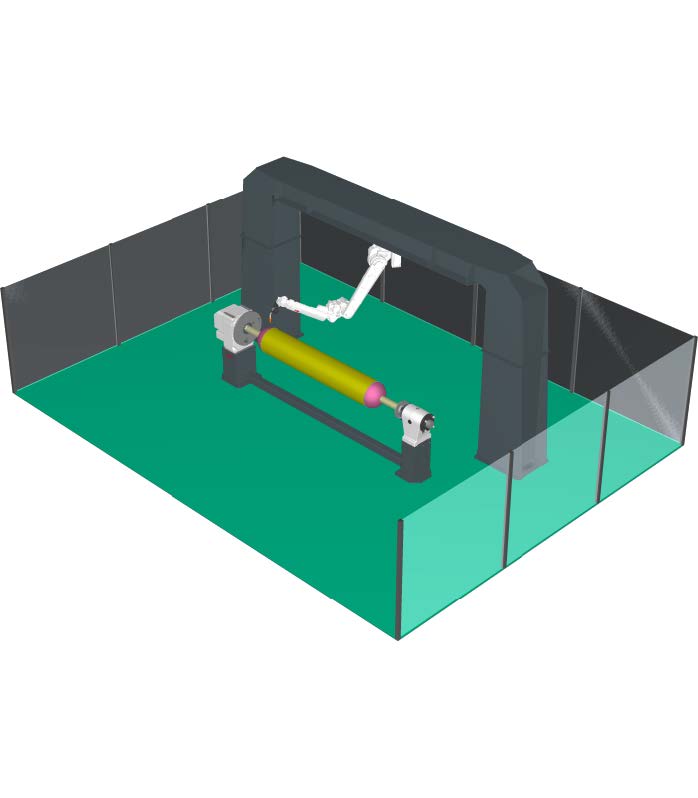
RoboDK软件助力飞机清洗时间缩短95%
Wilder Systems公司将RoboDK机器人编程功能用于自动化飞机清洗。他们利用两台发那科(Fanuc)机器人和一架F-16飞机,设计了首个机器人“得来速”式飞机清洗系统。

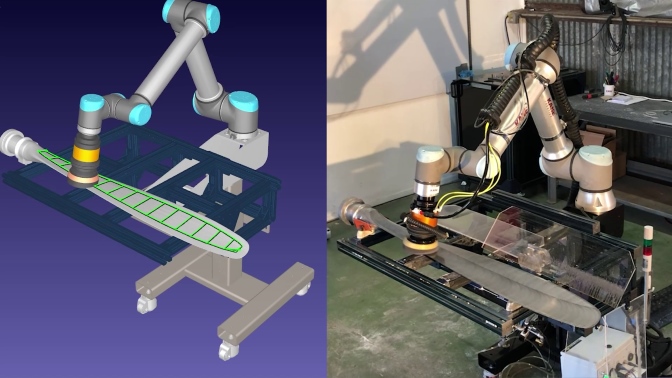
机器人加工实现雕刻精度
了解RoboDK如何帮助Neoset Designs的艺术家们使用机器人加工技术,以空前的效率创造出精致、复杂又精确的雕塑作品。

美国国家航空航天局(NASA)使用RoboDK进行多机器人检测
美国国家航空航天局(NASA)利用RoboDK实现了双机器人检测,提高了质量控制流程中的效率和精度。